EFEM的结构与Sorter相似,但其主要目的是与主设备配合使用。EFEM的核心组件包括圆装载系统(Loadport)、晶圆运输机器人(Robot)和晶圆对准器(Aligner)。在EFEM中,Loadport负责晶圆的装载与卸载,其智能性和灵活性使得它成为半导体工厂中不可或缺的接口模块。使用者可以根据实际需求选择不同配置的Robot,如单臂单叉、单臂双叉或双臂双叉,以及从1到4工位的Loadport。
厦门蚨祺自动化设备有限公司的两款明星产品
EFEM与Sorter是厦门蚨祺自动化设备有限公司的两大核心产品。EFEM,作为与主设备协同作业的关键组件,其特色在于其圆装载系统(Loadport)、晶圆运输机器人(Robot)以及晶圆对准器(Aligner)的完美结合。而Sorter,则以其高效、精准的晶圆分类与传输功能,在半导体生产流程中发挥着不可或缺的作用。这两款产品共同构成了厦门蚨祺在自动化设备领域的强大实力与独特优势。
晶圆运输机器人(Robot)
晶圆运输机器人,根据其应用环境,可分为大气机械手和真空机械手两类。真空机械手在洁净度、精确度以及晶圆固定方式等方面有着更为严苛的要求,因其需直接进入工艺腔,故其技术壁垒和市场壁垒均相对较高。此外,半导体机械手的运动形式多种多样,其中R-θ型(圆柱/极坐标型)、SCARA型(关节型)以及蛙腿型(对称连杆型)是较为常见的几种类型。
厦门蚨祺自动化设备有限公司的晶圆运输机器人,专为不同尺寸的晶圆设计,无论是8inch还是12inch,都能轻松应对。其双臂传送方式,确保了高效且稳定的工作流程。wafer的固定方式灵活多样,包括真空吸附、下托和边缘夹持,为用户提供了多种选择。牙叉采用陶瓷、碳纤维或铝合金等材料,确保了其耐用性和精度。此外,机器人采用正运动控制模式,结合模块化设计,使其能够轻松兼容各种机台配置。根据实际需求,用户还可以增加走行轴,提升工作效率。同时,牙叉上配备的自动Mapping功能,进一步优化了操作流程。在安全方面,机器人提供操作安全防护报警,确保封闭式作业环境下的操作安全。此外,该产品已成功通过SEMI S2认证,品质有保证。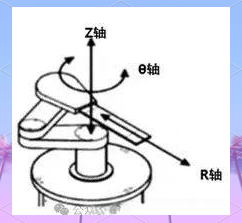
机械手硬件结构与工作原理
厦门蚨祺自动化设备有限公司的晶圆运输机器人,其机械手部分采用了精妙的硬件结构和严谨的工作原理。双臂传送设计,配合高效且稳定的控制系统,使得无论是8inch还是12inch的晶圆,都能得到轻松且精准的传输。同时,多样的wafer固定方式,包括真空吸附、下托和边缘夹持,为用户提供了极大的灵活性。牙叉材质上,公司选用了陶瓷、碳纤维或铝合金等高强度材料,既保证了耐用性,又确保了工作精度。此外,机器人采用的正运动控制模式和模块化设计,使得它能够轻松适应各种机台配置,满足用户的多样化需求。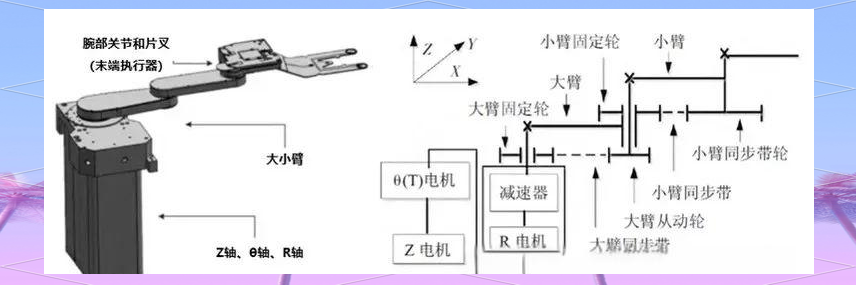
机械手软件架构
厦门蚨祺自动化设备有限公司的晶圆运输机器人,不仅在硬件结构上独具匠心,其软件架构同样展现了高水准的设计。通过精细的软件编程,机器人能够实现高效且稳定的晶圆传输,确保每一个动作都精准无误。同时,友好的用户界面和灵活的配置选项,使得用户能够轻松地操控机器人,满足各种复杂的工作需求。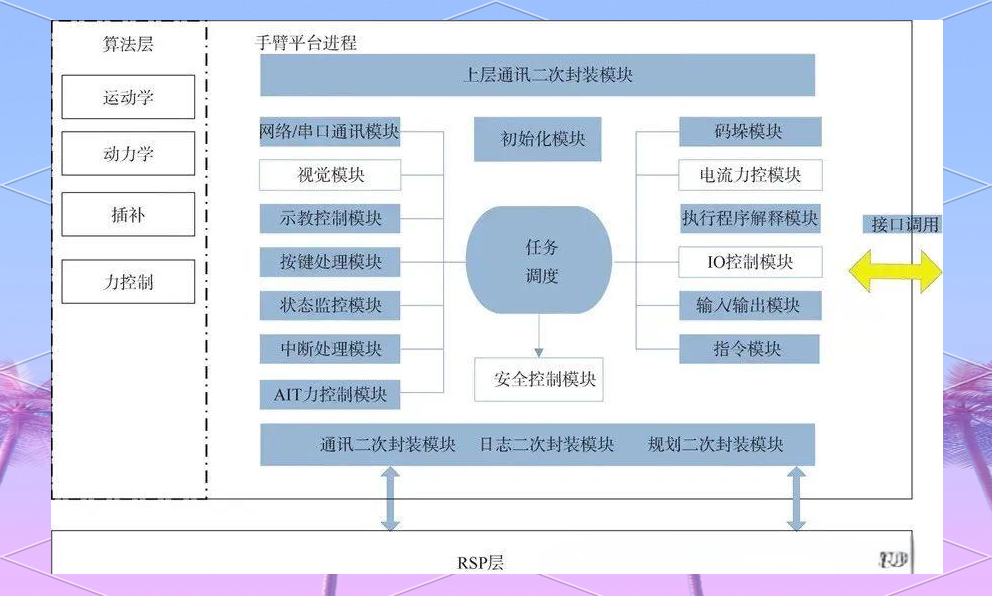
全球Robot生产设备厂商排名
在全球化竞争日益激烈的今天,各大Robot生产设备厂商都在不断追求创新与卓越。究竟哪些厂商能够在激烈的市场竞争中脱颖而出,成为行业的佼佼者?接下来,就让我们一起探寻全球Robot生产设备厂商的排名情况。
Aligner(预对准器)
在Robot生产设备领域,Aligner(预对准器)扮演着至关重要的角色。它负责确保机器人组件的精确对准,为后续的组装和调试提供有力支持。在众多厂商中,哪些企业能够提供高性能的Aligner产品,从而在激烈的市场竞争中占据一席之地?接下来,我们将深入探讨这一关键设备在全球范围内的生产情况。
盛拓半导体科技有限公司的Aligner(预对准器)产品,通过结合LED照明与图像识别传感器,能够精细地检测晶圆的边缘,并准确识别Notch槽和晶圆中心,进而校准不同材质晶圆的位置,确保后续工序中的精准摆放。该产品主要分为机械式和光学式两大类晶圆预对准机。机械式预对准机虽然使用复杂的机械结构进行预定位,但因其容易对晶圆造成污染和损伤,且定位精度不高,正逐渐被光学式预对准机所取代。而光学预对准则分为图像检测和晶圆边缘检测两种类型,本产品即属于后者。它通过传感器采集晶圆旋转一周的完整边缘信息,再运用算法计算出定心和定向的偏差值,并通过对应轴系进行补偿,从而实现高精度的对准。此外,从结构上分类,该产品属于θ-R-Z型,其设计使得定心补偿更为出色,进一步提升了对准的精确度。

