联合国R171-DCAS法规的生效,能否为全球驾驶辅助系统的命名规范带来曙光?
法规正式实施
2024年9月,欧洲经委会世界车辆法规协调论坛(WP.29)在2024年3月会议上通过的《联合国UN R 171--DCAS驾驶员控制辅助系统》法规正式生效。这一法规的出台,为全球驾驶辅助系统的命名规范带来了新的希望。
法规背景
近年来,随着汽车技术的不断发展,越来越多的汽车制造商开始在其车辆上配备“DCAS驾驶员控制辅助系统”。这些系统通过感知交通流量并相应地调节车辆的加速和减速,从而为驾驶员提供支持。尽管这些系统在一定程度上减轻了驾驶员的工作负担,提升了驾驶的舒适度,但它们并未完全取代驾驶员的角色。驾驶员仍需保持对车辆的控制,时刻监控周围环境和车辆性能。因此,这类系统被归类为SAE L2级自动驾驶。
然而,由于联合国欧洲经济委员会此前缺乏针对此类DCAS系统的统一法规,UNECE自动和互联车辆工作组于2021年成立了专门小组,负责制定新的UNECE DCAS法规。该法规旨在为这类技术中立的系统制定统一的安全规范和要求。经过数年的努力,该工作组最终完成了联合国欧洲经济委员会第171号条例的制定工作,该条例于2024年9月22日正式生效。
法规详解
第171号法规对DCAS进行了明确定义,它是一种辅助驾驶员持续控制车辆纵向和横向运动的系统,但并不会接管整个驾驶任务。这类系统与SAE L2级自动驾驶相对应,意味着在使用时,驾驶员仍需负责控制车辆,并时刻监控周围环境和车辆性能,以便随时进行干预。
该法规于9月30日生效,并详细规定了DCAS的安全和性能要求。为了确保驾驶员的可用性和参与度,法规要求在检测到驾驶员缺乏参与度时,必须制定有效的警告策略。此外,为了防止驾驶员过度依赖某些辅助系统,法规还规定车辆制造商在销售车辆时,必须通过多种手段向用户清晰传达DCAS的局限性及驾驶员在使用时的责任。
值得注意的是,这一新法规适用于安装在M和N类车辆上的DCAS,包括乘用车、多用途乘用车、货车、皮卡、重型卡车、公共汽车和长途汽车。在此,DCAS被定义为能够持续协助驾驶员控制车辆纵向和横向运动的硬件与软件结合体。
该法规不仅对DCAS的定义进行了明确,还详细规定了其必须满足的设计和性能标准。同时,为了确保车辆配备DCAS后能够满足这些要求,法规还制定了相应的测试程序,要求车辆必须通过这些测试来证明其符合性。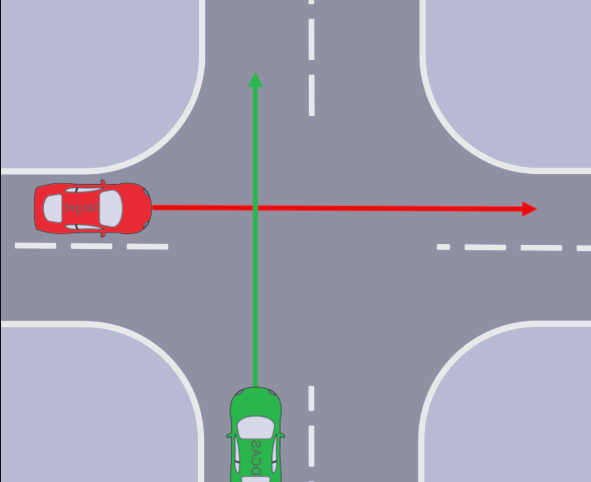
此外,该法规还要求车辆制造商必须编制详尽的文件,其中应详细阐述DCAS的设计理念和操作方式,同时包含DCAS的安全概念,并提交相关证据,以证明在整个系统的设计和开发过程中,功能和操作安全已得到充分考虑。
系统设计和性能要求
通用要求
- 该系统的设计应致力于确保驾驶员能持续地执行驾驶任务。
- 制造商需制定策略,以保障模式意识,防止驾驶员过度依赖系统。这些策略应通过满足第4段的规定来加以证明。
- 制造商必须采取有效措施,以防止驾驶员可能合理预见的误用,以及未经授权对系统软件和硬件组件的修改。
- 系统需为驾驶员提供一种安全超控或停用系统的方法。
- 配备DCAS的车辆,至少应同时配备AEBS高级紧急制动系统。此外,还应配备车道偏离预防系统或车道偏离警告系统。这些系统需符合联合国第1179号法规(关于纠正转向功能)和第130号法规的技术要求和过渡性规定,这些规定根据具体情况适用于配备DCAS的车辆类别。
功能要求 - 系统需具备评估和响应周围环境的能力,以确保在系统预设的界限内实现其预期功能,并尝试在超出界限时仍能有所作为。
- 该系统应致力于通过符合安全导向的行为,来适应周边的交通状况,从而避免对交通流畅造成阻碍。
- 一旦系统侦测到潜在的碰撞风险,它应致力于避免碰撞或至少减轻其严重程度。
- 在不影响其他联合国法规规定的情况下,系统应能操控车辆的纵向和横向运动,以维持与道路其他使用者之间的适当距离。
- 根据系统操作需求,可以激活相关车辆系统,例如方向指示灯、雨刮器在雨天时的自动开启、加热系统等。
- 系统的控制策略应精心设计,旨在保持车辆可控性的同时降低碰撞风险,并充分考虑驾驶员的反应时间。
对系统边界的响应-详细说明在何种操作条件超出系统设计运行边界时,系统应如何作出反应,例如将控制权无缝交还给驾驶员。
可控性-确保在各种情境下,无论是驾驶员有意超越系统还是重新夺回控制权,车辆都能保持稳定可控。
车道定位-规定系统必须协助车辆在行驶车道内保持稳定位置,同时紧密遵循道路/车道的轮廓。
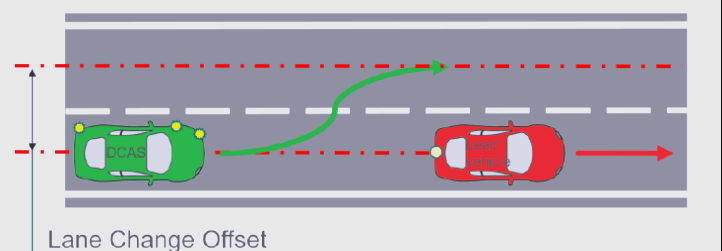
执行“机动”动作-在系统具备机动能力的情况下,如变道、十字路口转弯或环形交叉口通行等,系统必须以安全无误的方式执行这些动作,并确保不会危害其他道路使用者。
驾驶员状态监控-要求车辆配备持续监控驾驶员的系统,旨在确保驾驶员始终关注前方道路,并在必要时能够接管驾驶任务。
驾驶员脱离警告-明确在确定驾驶员脱离驾驶位置时,系统必须执行的光学、听觉和触觉警告措施,以及警告升级的顺序。
风险缓解功能-规定车辆在确认驾驶员无法使用时,必须能够安全地将车辆停下。
速度限制合规性-要求系统自动控制车辆速度,同时确定车辆所在道路的适用限速,并在速度超过限制时向驾驶员发出警告。
系统对故障的响应-详细说明当系统或其组件发生故障时,系统应如何作出反应,例如向驾驶员发出警告并安全地交还控制权。
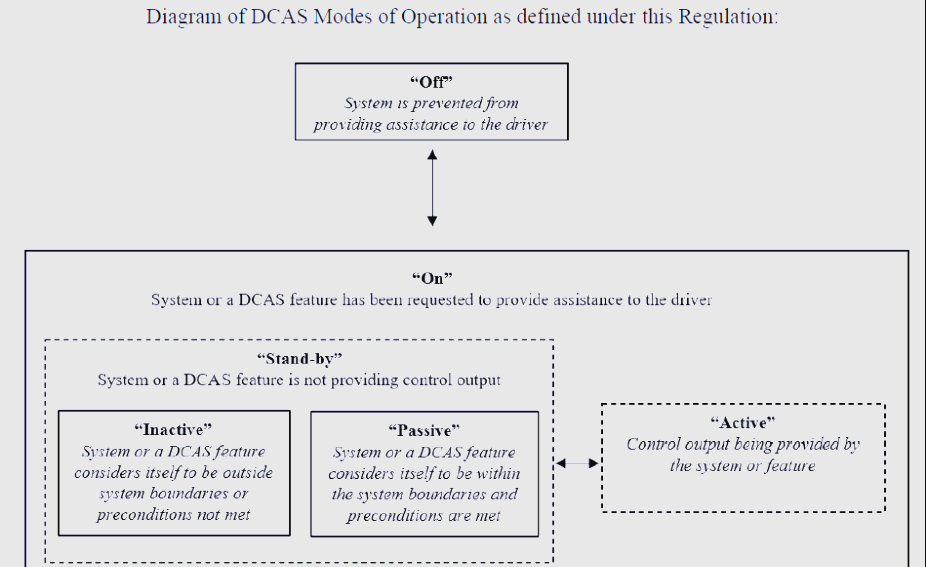
系统激活与停用-明确激活系统所需的条件,以及导致系统自动停用的条件,同时确保适当地将控制权转回给驾驶员。
驾驶员信息提供-规定必须向驾驶员提供的光学、听觉和触觉信号及消息,以显示系统的运行状态并提供必要的警告。
驾驶员信息材料-要求车辆用户手册中必须包含关于系统的详细信息,包括系统功能及驾驶员在使用系统时的责任。
软件更新-规定任何软件更新的流程必须遵循UN ECE关于软件更新的第156号法规的要求。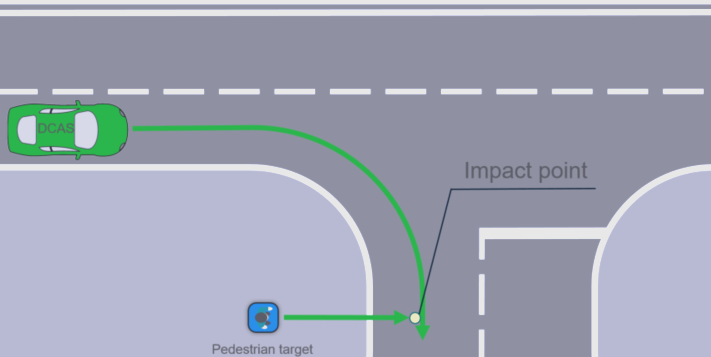
法规影响
“新颁布的联合国DCAS条例显著提升了辅助系统使用时的驾驶员监控水平,进一步强化了驾驶员对驾驶任务的责任感。这一里程碑式的法规,预示着未来自动驾驶技术将迈向更高层次的自动化。”
--WP.29 GRVA主席Richard Damm
该法规不仅强调了驾驶员在驾驶任务中的参与度,还明确规定了DCAS必须达到的一系列设计和性能标准。此外,法规还详细制定了配备DCAS车辆的测试程序,并对L2级智能驾驶车辆提出了明确的要求。值得一提的是,欧盟委员会正计划对通用安全法规Reg.(EU) 2019/2144(即GSR法规)进行修订,旨在将适用于L2级驾驶自动化系统的DCAS法规纳入其中。一旦实施,这将意味着中国车企的产品必须满足相应的法规认证要求。

