在上一次的讨论中,我们概述了三菱PLC运动控制指令的使用方法。现在,让我们进一步深入探讨这些指令的各自功能及其适用的场合。特别需要注意的是,这些指令中包括PLSY、PLSR、PLSV以及DRVI和DRVA这五个,它们各自有着独特的特点和用途。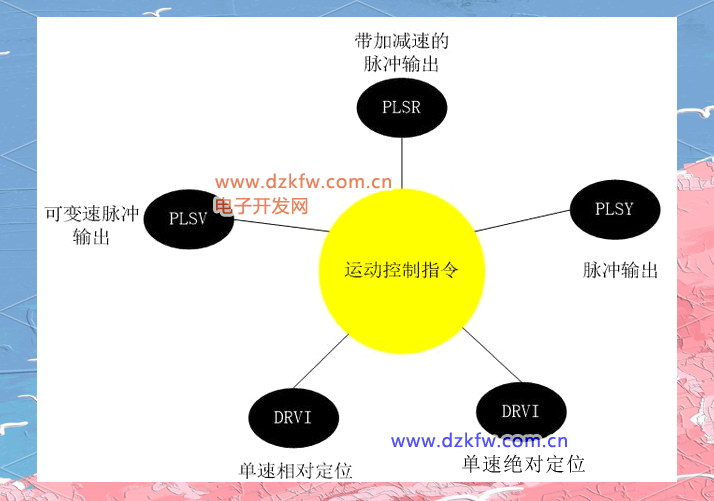
三菱运动控制指令
PLSY脉冲输出
指令语句:PLSY S1 S2 D
其中,S1代表指定频率,S2设定脉冲数量,而D1则指定脉冲输出端口。值得注意的是,此指令缺乏旋转方向控制,即方向无法自动识别,因此在实操中需额外指定。其脉冲寄存器为累计型,意味着脉冲计数不受旋转方向影响,始终递增。但这也意味着指令中断后,位置信息无法记忆,重新启动时需从起点开始。此外,若在指令执行过程中修改S1,其修改将立即生效,而S2的修改则需等待下次执行。同时,指令中断后会立即停止脉冲输出,无加减速过程。由此可见,PLSY指令主要用于简单的定位需求。然而,它也存在一些不足,如旋转方向需手动指定、无位置记忆功能以及无加减速功能。
PLSR加减速脉冲输出
指令语句:PLSR S1 S2 S3 D
相较于PLSY,PLSR指令新增了加减速时间参数S3,使得在输出脉冲时能实现加减速功能。其他方面,如S1和S2的设定以及D1指定的脉冲输出端口,两者保持一致。需注意,在指令运行过程中修改S1和S2无效,更改内容将在下一次指令驱动时生效。
PLSV可变速脉冲输出
指令语句:PLSV S1 D1 D
其中,S1代表脉冲频率,D1为脉冲输出端口,而D2则用于输出旋转方向。该指令的独特之处在于其能自动输出旋转方向,无需手动指定。同时,它还提供了位置信息,可通过脉冲寄存器获取。值得注意的是,S1的值可设置为负,且在指令运行时可以改变其频率值。特别提醒,在更改符号时需先设为0再作修改。此外,通过置位特殊辅助继电器M8338可以激活加减速功能,加减速设置则通过特殊数据寄存器完成。当指令断开或遇到正反转极限标志时,将触发减速停止动作。
相较于PLSY和PLSR,PLSV指令不仅带有加减速功能,还能自动控制旋转方向和记忆位置,非常适合需要计算目标位置距离与方向的定位场景。
DRVI相对单速定位
指令语句:DRVI S1 S2 D1 D
DRVI指令允许我们进行相对单速定位。其中,S1表示输出脉冲(即相对位置),S2设定脉冲频率,D1指定脉冲输出端口,而D2则负责输出旋转方向。该指令不仅能定位,还能自动输出旋转方向,同时具备加减速功能。值得注意的是,这里的脉冲数可以是正数或负数,正数表示正传(D2为ON状态,脉冲寄存器增计数),负数则表示反转(D2为OFF状态,减计数)。因此,DRVI指令在实现相对位置定位方面非常灵活和强大。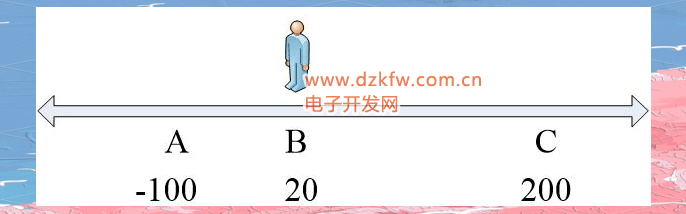
位置
想象一下,你现在位于B点,其坐标为20,现在你打算前往A点,其坐标为-100。使用相对位置定位,你需要计算出B点和A点之间的距离,也就是-120,然后通过S1指令输出-120的脉冲。而如果你选择绝对位置定位,你只需输入A点的坐标-100,S1将输出-100的脉冲。
再来看一个例子,假设你现在在B点,打算前往C点,其坐标为200。同样地,采用相对位置,你需要计算B点和C点之间的距离,即180,然后S1将输出180的脉冲。而使用绝对位置,你只需输入C点的坐标200,S1将直接输出200的脉冲。
DRVA绝对单速定位
DRVA指令与DRVI类似,但有两点主要区别。首先,DRVA采用绝对位置进行定位。其次,在旋转方向的输出方面,它依据目标位置与当前位置的差值来决定。如果差值为正,则正转寄存器进行增计数;如果差值为负,则反转寄存器进行减计数。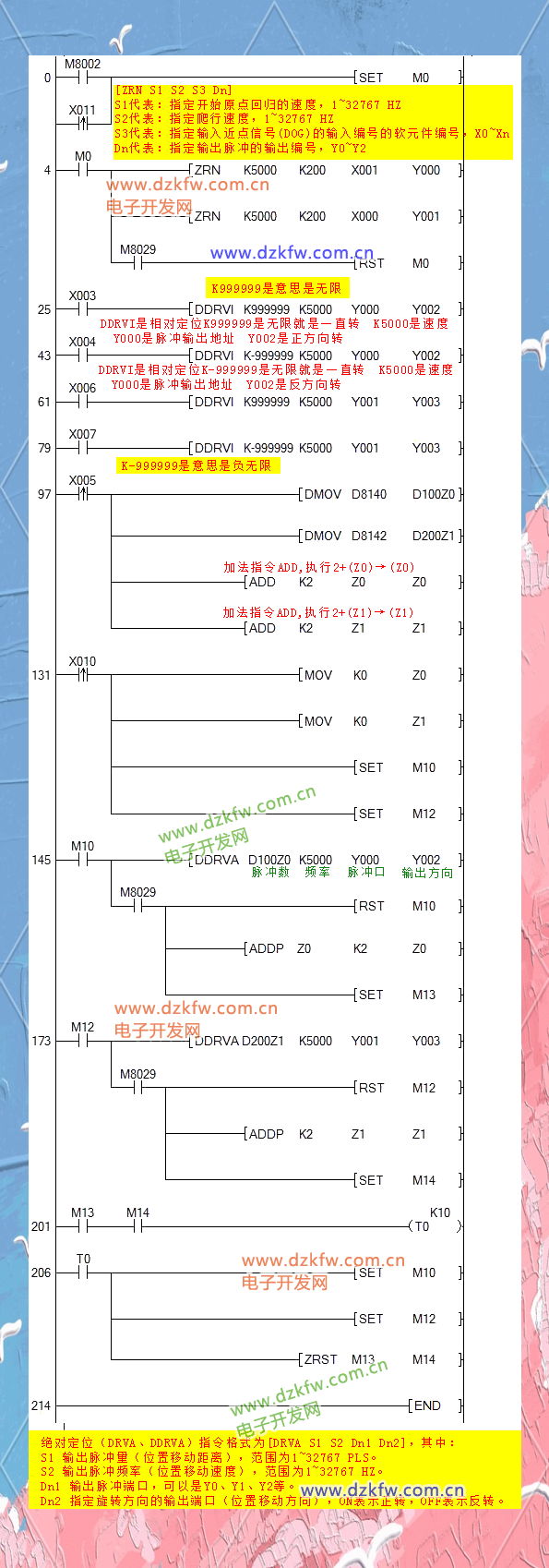
三菱PLC驱动伺服电机控制详解
要点总结
在运动控制领域,三菱PLC提供了多种指令以满足不同的需求。这些指令大致可分为调速和定位两大类。PLSY和PLSV指令能在指令运行过程中实现变速,而PLSR指令则主要用于运行加减速(启动加速、减速停止)。此外,PLSV、DRVI和DRVA指令还可实现任意的减速停止功能。值得注意的是,PLSY、DRVI和DRVA都具备内置定位功能,但PLSY不具有位置记忆功能,而PLSV的定位则依赖于脉冲寄存器。因此,在运动中需要频繁变速的场合,PLSY和PLSV是合适的选择;而若对定位精度有较高要求,且运动较为频繁,那么DRVI与DRVA指令则更为适用。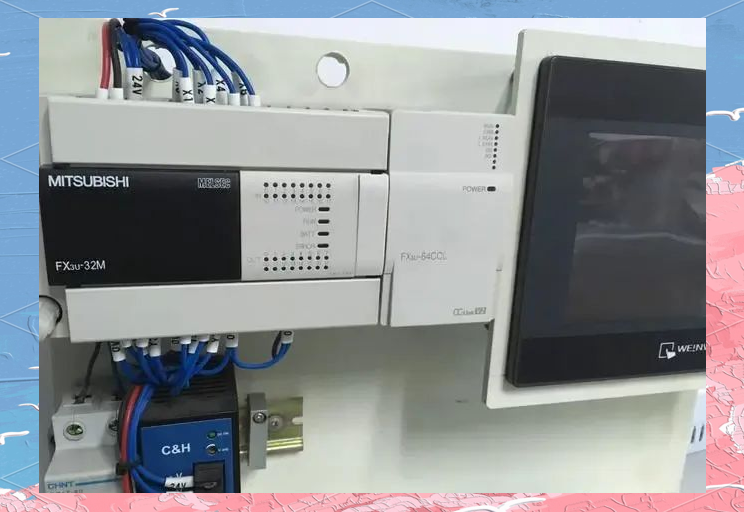
三菱PLC编程探秘
在运动控制领域,三菱PLC编程展现出了其独特的魅力。通过合理运用不同的指令,编程人员能够轻松实现对伺服电机的精细控制。这些指令不仅功能强大,而且灵活多样,为各种复杂的运动控制任务提供了有力的支持。无论是调速、定位,还是其他的运动控制需求,三菱PLC都能通过编程轻松实现。

