 有用
有用

疆亘观察
人型机器人当下处于从“0”到“1”的萌芽期阶段。随着人工智能的发展,作为人型机器人的执行末端和核心部件,灵巧手的性能和成本一定程度决定了人型机器人落地的步伐,是一个确定的赛道。
摘要
灵巧手从开始简单的机械手发展成现在的高科技人形仿生灵巧手。当下主要面临的问题主要有两方面:一智能化仍满足不了实际需求;二成本仍让场景应用仍无法大规模推广。随着政策的大力扶持,以及AI的持续深入发展,叠加规模化带来的降本,灵巧手的商业化有望在未来5年加速落地。
风险
AI发展不及预期;人型机器人发展不及预期。
正文
01
灵巧手介绍
G A G E
01
灵巧手发展历史:随着人型机器人的爆发,推广在即
灵巧手是机器人的一种新型末端执行器。一般而言,机器人与环境交互的方式主要包括:移动行走、视觉等信息的获取、决策的执行输出。末端执行器 (EndEffector) 是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器作为机器人与环境相互作用的最后环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。
海外灵巧手发展现状
海外灵巧手研究历经了 50 余年的发展,从开始简单的机械手发展成现在的高科技人形仿生灵巧手。
20 世纪 70 年代,日本“电子技术实验室”研制出了 Okada 灵巧手,该灵巧手具有 3 个手指和一个手掌,拇指有 3 个自由度,另外两个手指各有 4 个自由度,采用电机驱动和肌腱传动方式。 20 世纪 80 年代,美国斯坦福大学研制成功 Stanford/JPL 灵巧手,该手有 3 个手指,每指各有 3 自由度,采用 12 个直流伺服电机作为关节驱动器,采用腱驱动系统传递运动和动力;美国麻省理工学院和犹他大学联合研制 Utah/MIT 灵巧手,该手具有完全相同的 4 个手指,每个手指有 4 个自由度,为后续仿人型多指灵巧手研究建立了理论基础。 20 世纪末,随着嵌入式硬件的发展,多指灵巧手的研究向着高系统集成度和丰富的感知能力提升的方向发展,进入了快速发展阶段。 近年来,高度系统集成的灵巧手具有灵活性和功能性的优势,但是复杂的系统导致了高额的制造成本并且降低了系统的可靠性和易维护性。因此近 10 年,多指灵巧手设计的一个重要方向是简化系统、提高鲁棒性。

国内灵巧手发展现状
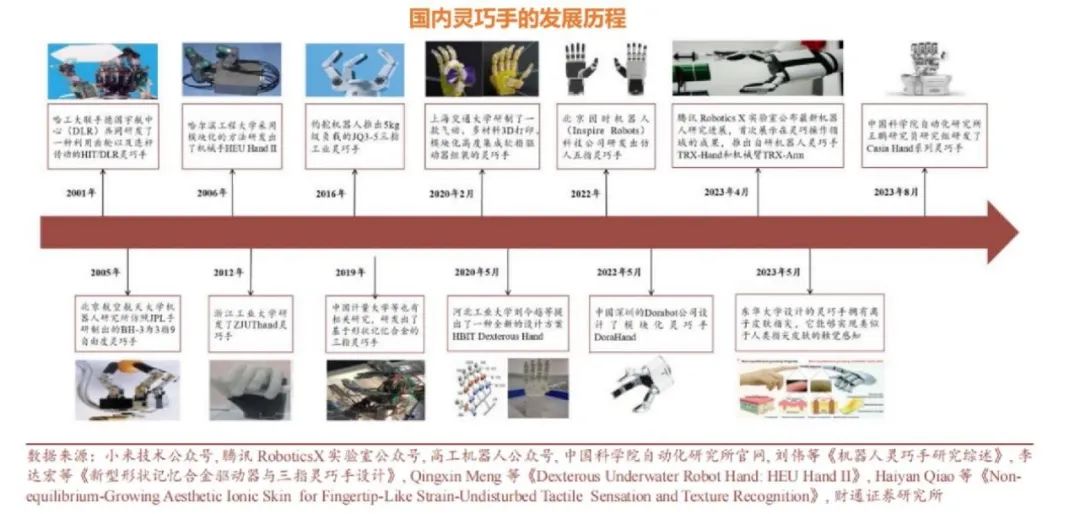
国内灵巧手的研究则是随着国外研究的不断推进。在 2000 年左右国内一些机器人研究机构和部分高等院校相继开展了机器人多指灵巧手的研究工作。
2001 年,哈工大(HIT)联手德国宇航中心(DLR)共同研发了一种利用齿轮以及连杆传动的 HIT/DLR 灵巧手。DLR 有 4 根手指,每根手指有 3 个自由度。指尖部分采用多连杆耦合机构,基础关节的 2 个自由度通过差动机构耦合来完成。 2005 年,北京航空航天大学机器人研究所仿照 Stanford/JPL 手研制出了 BH- 3 为 3指 9自由度灵巧手。BH 灵巧手主要用于多指手的操作理论研究;通过数据手套可实现远距离控制。最新一代灵巧手 BH-985,其具有 5 个手指,外形尺寸约为人手的 1.5 倍,质量小于 1.5kg,采用内置的 Maxon 直流伺服电机驱动,用齿轮、连杆和钢丝传动。 2022 年 5 月 23 日,DoraHand 是由中国深圳的 Dorabot 公司设计的模块化灵巧手。鉴于其 5mm 的厚度,指尖可以在一些狭小的空间中使用。为了提供类似人类的能力,这款手配备了一个高度敏感的 0.3mm 薄膜力传感器,作为触觉传感器,可同时感知力和位置。 2022 年,北京 Inspire 机器人科技公司研发的灵巧手。它有 5 个手指、6 个自由度和灵活的抓取能力,大小接近人类的手。拇指手指有 2 个自由度,而其他手指只有 1 个自由度。6 个带有肌腱的微型线性致动器用于驱动手指。这款灵巧手的效率很高,可以用于假肢、服务机器人和教学等领域。 2023 年 4 月 25 日,腾讯 RoboticsX 实验室公布最新机器人研究进展,首次展示在灵巧操作领域的成果,推出自研机器人灵巧手 TRX-Hand 和机械臂 TRX-Arm。其中,灵巧手 TRX-Hand拥有像人手一样灵活的操作能力,可适应不同场景,灵活规划动作,自主完成操作。而机械臂 TRX-Arm 针对人居环境自主研发,拥有七自由度和拟人的特性,具有运动灵巧、爆发力强、触控一体以及柔顺安全等特点。
02
灵巧手的分类
机器人灵巧手作为一种新型的末端执行器,在机器人与环境的交互中起着关键作用。根据自由度数量、驱动方式、机械传动形式以及感知技术的不同,灵巧手可以分为若干类型。
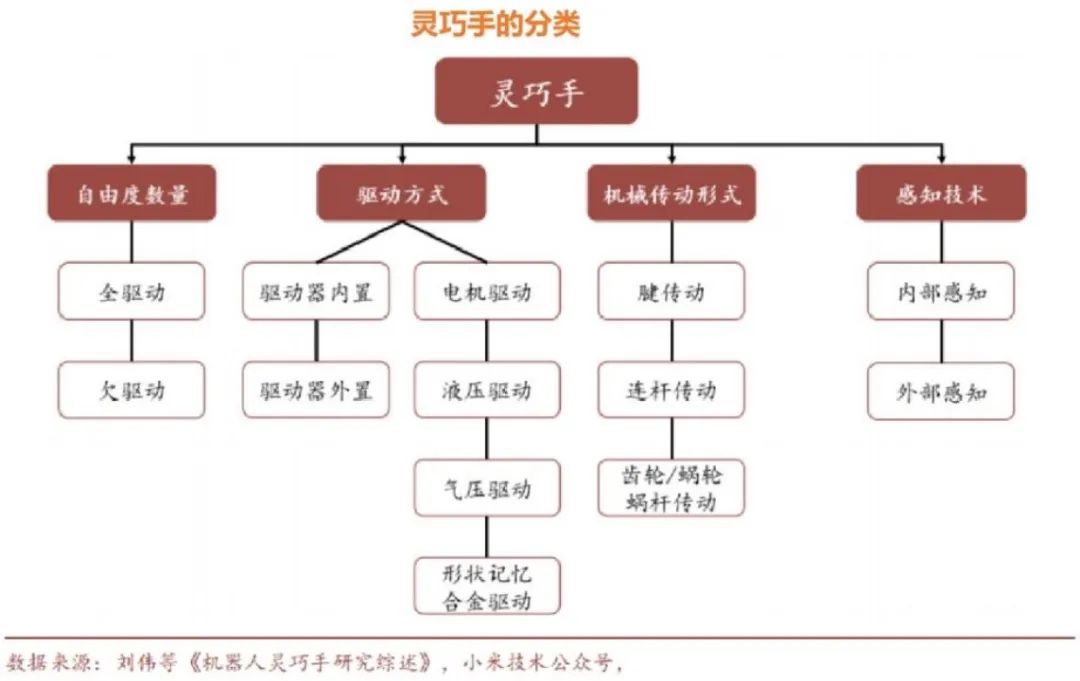
灵巧手的分类:机械传动形式
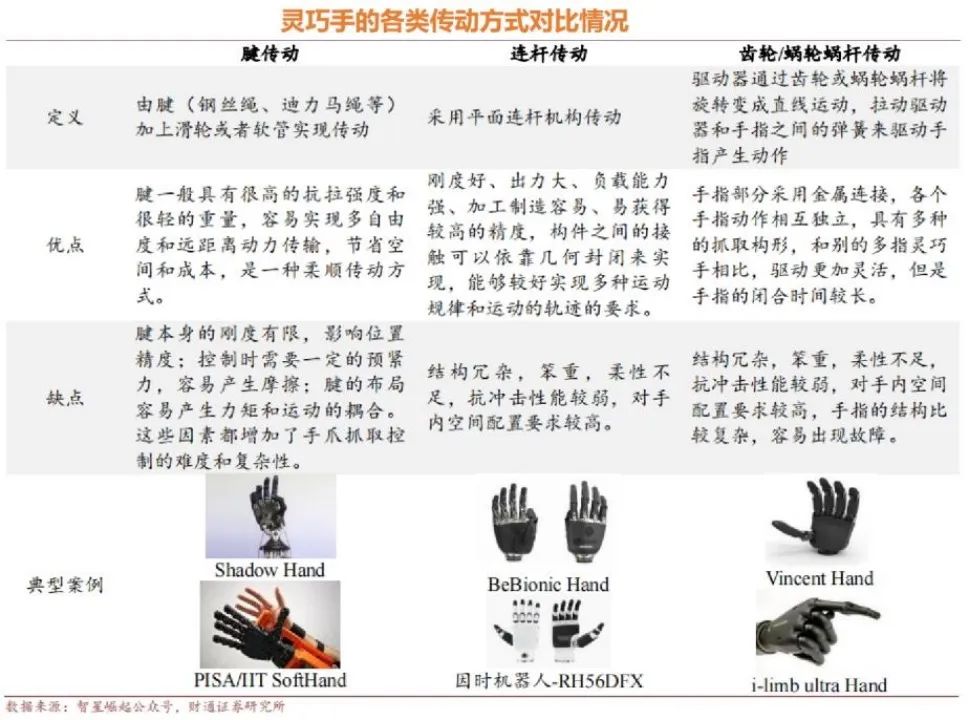
机器人灵巧手传动系统把驱动器产生的运动合力以一定的方式传递到手指关节, 从而使关节做相应的运动,传动系统的设计与驱动器密切相关。虽然驱动源是影响灵巧手体积重量的重要因素,但是抓取稳定性和灵活性等重要指标取决于传动系统。
灵巧手的主要传动方式有腱传递、连杆传动和齿轮/蜗轮蜗杆传动。线绳驱动是目前灵巧手研究中应用最为广泛的一种传动方式;齿轮/蜗轮蜗杆传动在工业机器人中应用比较广泛;连杆传动多用于工业和商业用途,多个连杆串并联混合的使用形式较为常见。
02
灵巧手的自由度
G A G E
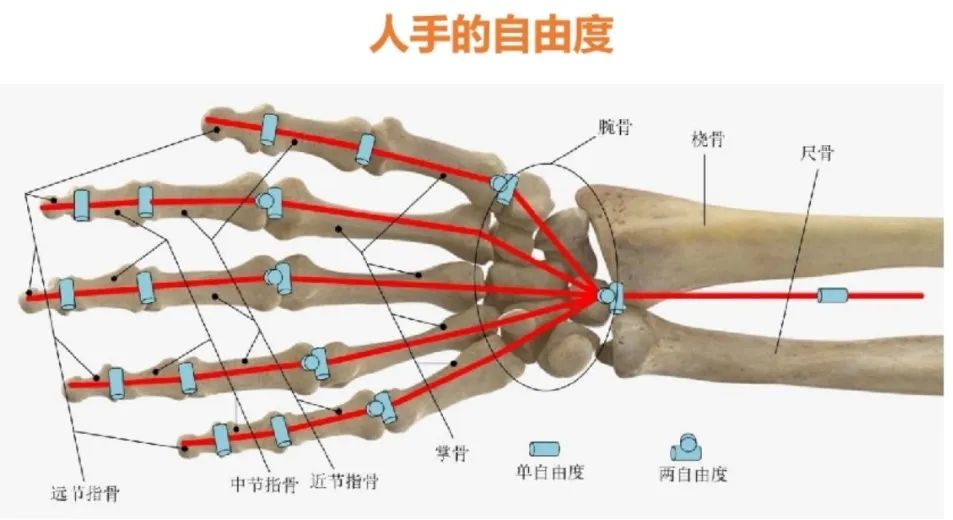
人手作为自然界中功能性和灵活性极高的机构,其强大性能源于指骨、肌腱、韧带、肌肉和其它各类软组织的最优结构配置。人手手部共 20 个自由度,腕部 2 个自由度,小臂有 1 个自由度,其分布见图。五根手指均由 3 根骨组成,每根手指有 4 个自由度。手掌由除拇指外四根掌骨进行支撑。手部通过腕骨与尺骨、桡骨进行连接并在此处形成 2 自由度关节。小臂的尺骨、桡骨除支撑外,通过二者的相互扭转可实现手掌的整体旋转。
目前市场上已出现来自多家公司的机器人多指灵巧手产品,其中Shadow dexterous hand已实现商品化。例如英国Shadow Robot公司推出的先进仿人型机器人手Shadow dexterous hand,其拥有24个自由度和20个可单独控制的自由度,可配备指端触觉传感器,是目前最成熟的商品化多指灵巧手之一。此外,德国SCHUNK的SF5H hand、德国FESTO的柔性多指灵巧手Bionic Soft Hand和北京因时机器人科技有限公司的RH56BF3仿人型多指灵巧手也都是较具有代表性的多指灵巧手产品。值得注意的是,这些多指灵巧手产品也并非完美,目前它们仍然不能实现与人手相当的自由灵活程度和操作能力,且价格较昂贵,推广应用难度大,因此灵巧手可能会成为未来机器人领域需要重点突破的方向之一。

03
灵巧手产业链和市场
G A G E
灵巧手成本拆分
未来人型机器人产业化成熟之后,预计单灵巧手占人形机器人成本14%。其中空心杯电机占人形机器人成本最高为6.9%,其次为触觉传感器、柔性材料、编码器、齿轮组、占比分别为3.5%、1.4%、2.3%、0.3%。

人型机器人灵巧手市场规模预测
灵巧手作为机器人执行末端,是人形机器人必不可少的部件,根据因时机器人网上报价,单只灵巧手价格约为 5 万元,如果未来人形机器人销量到达百万台,对应灵巧手市场规模将达到 1000 亿元。需要注意的是,未来人形机器人可能会应用到各种场景,对应的灵巧手配置各不相同,预计单价也会有较大的差别。

总 结
人型机器人当下处于从“0”到“1”的萌芽期阶段。人型机器人可极大解放生产力、改善人类生活需求,应对全球人口老龄化。当前阶段重点跟踪AI技术进展对人形机器人的赋能、产业/技术的最新进展,特别是特斯拉的进展。灵巧手作为人形机器人的执行末端和核心部件,其性能和成本一定程度上决定了人型机器人产业化的步伐。

