新华社北京7月4日电 据中国载人航天工程办公室消息,北京时间2021年7月4日14时57分,经过约7小时的出舱活动,神舟十二号航天员乘组密切协同,圆满完成出舱活动期间全部既定任务,航天员刘伯明、汤洪波安全返回天和核心舱,标志着我国空间站阶段航天员首次出舱活动取得圆满成功。
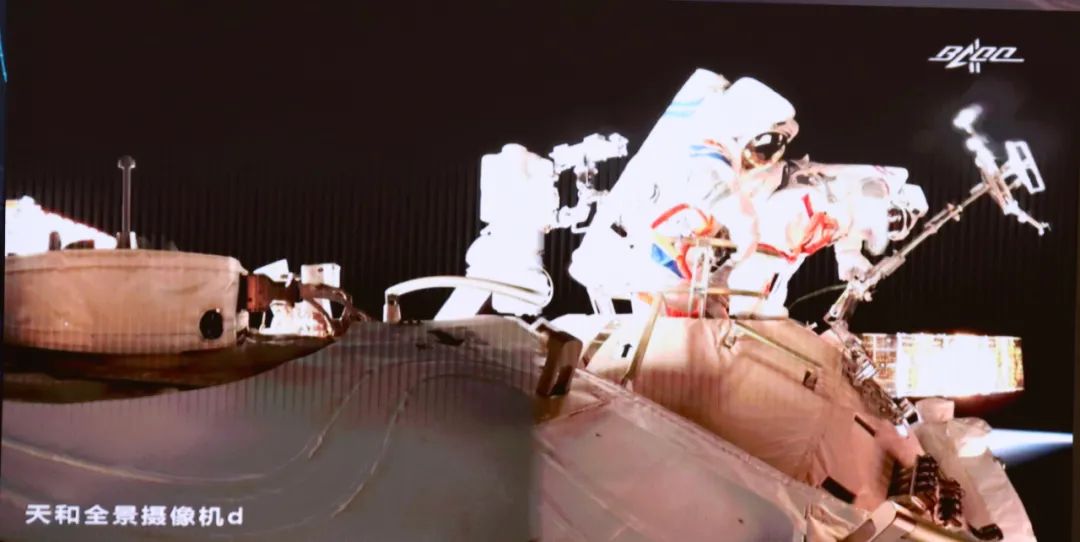
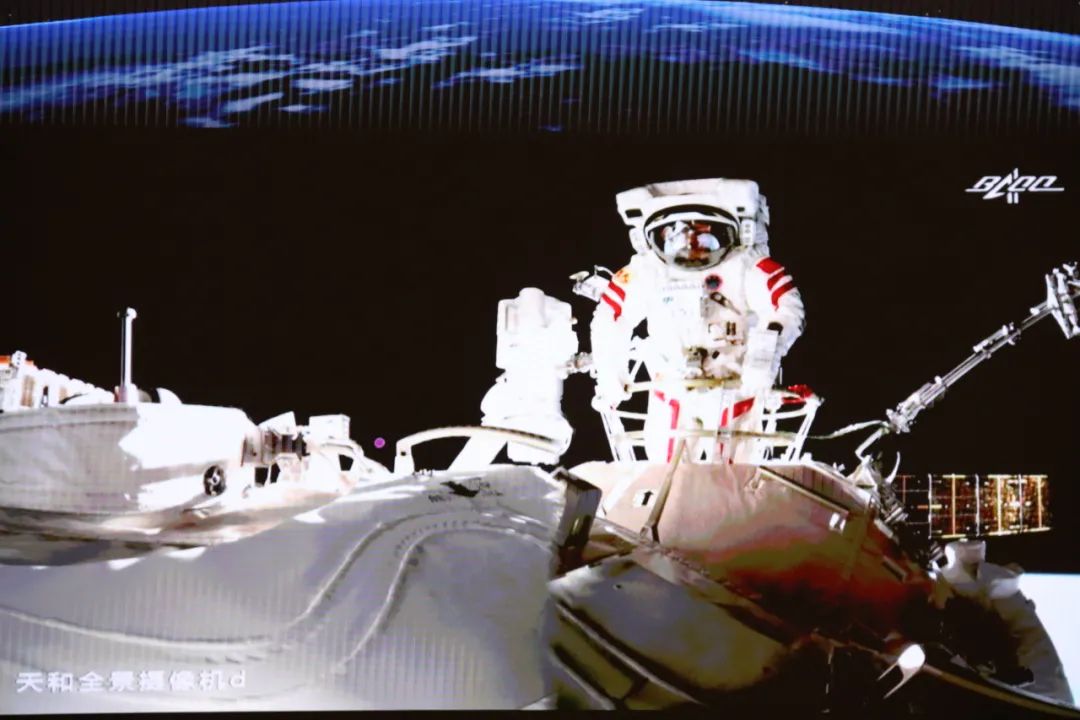
7月4日,在北京航天飞行控制中心大屏拍摄的航天员在舱外工作场面。新华社记者 金立旺 摄
这是继2008年神舟七号载人飞行任务后,中国航天员再次实施的空间出舱活动,也是空间站阶段中国航天员的首次空间出舱活动。
7月4日,在北京航天飞行控制中心大屏拍摄的航天员在舱外工作场面。新华社记者 金立旺 摄
此次出舱活动,天地间大力协同、舱内外密切配合,圆满完成了舱外活动相关设备组装、全景相机抬升等任务,首次检验了我国新一代舱外航天服的功能性能,首次检验了航天员与机械臂协同工作的能力及出舱活动相关支持设备的可靠性与安全性,为空间站后续出舱活动的顺利实施奠定了重要基础。
神舟十二号航天员乘组自6月17日进驻天和核心舱以来,按计划开展了各项工作,目前3名航天员状态良好,后续在轨飞行期间还将进行一次出舱活动。
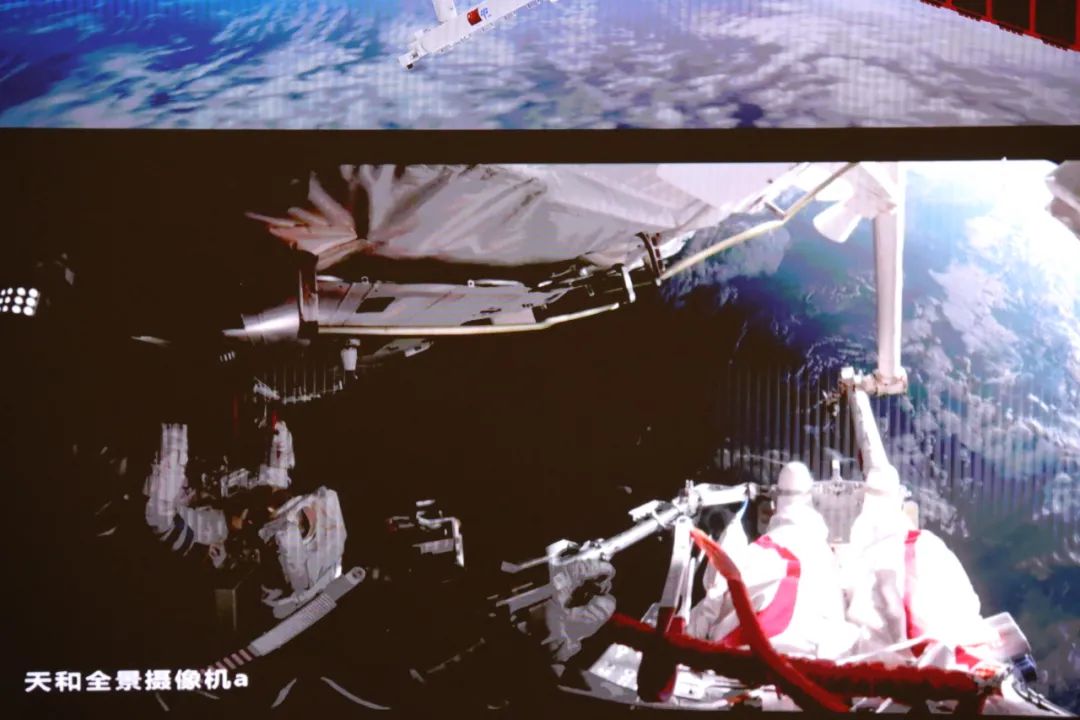
中国空间站全景相机拍摄画面
第一步:出舱
7月4日7时30分左右,北京飞行控制中心大屏幕上,刘伯明、汤洪波身着舱外航天服出现在节点舱。轨道舱舱门、节点舱前舱门、节点舱与小柱段之间的双向承压舱门都已关闭,两人现已被节点舱“包裹”起来。此刻,聂海胜正“坐”在大柱段的计算机前,时刻关注着两人的状态,并不时发出操作指令。
出舱准备工作继续,给节点舱泄压、航天员吸氧排氮、开展通信测试……这套流程与神舟七号载人飞船航天员出舱时相似,却又有所不同。“此次应用了气体复用技术,通过舱间抽气泵将节点舱的空气抽到大舱,空气复用率较高。”航天科技集团五院空间站系统总体副主任设计师汤溢介绍。
8时11分,舱内气压接近真空状态,刘伯明打开节点舱上方的出舱口舱门,第一次亲眼见证舱外环境,不禁脱口而出:“外面是黑的。”
在两人配合给舱门装上保护罩后,刘伯明一个跃身来到了浩瀚宇宙。节点舱高清摄像机、航天服摄像机以及舱外全景摄像机全程拍下了这一过程。
“哇,这外面太漂亮啦!”刘伯明惊叹道。
在此之前,空间机械臂已经来到了出舱口,进入整臂待机制动状态。就像我们熟知的云台车一样,它将是航天员在舱外的移动工具和临时工作站。
刘伯明出舱门后,汤洪波并没有紧随其后。接下来一段时间,他们要以一上一下的姿态,打好第一场配合战——在空间机械臂上安装脚限位器和操作台。就像地面建筑施工队似的,汤洪波负责“搬砖”,刘伯明负责“搭建”。
刘伯明接过汤洪波从舱内递上来的脚限位器,将其安装在空间机械臂的一端。这是底座,也是用来固定航天员双脚的,航天员“站”在上面可以随机械臂“爬行”而移动。舱内,汤洪波正在对操作台组件进行初步安装,随后用带挂钩的绳传递给刘伯明,由刘伯明安装在脚限位器一侧。这就是舱外工作用的操作台。在刘伯明的腰间,还有一个微型工作台,这是他在舱内就已经戴好了的。
“没有看到满天繁星吗?”9点30分左右,操作台安装完成,聂海胜忍不住问。10点20分左右,刘伯明上机械臂,机械臂移动到接设备点。最后传递上来的是此次舱外工作要用的把手、抬高支架和一些专用工具递上来,刘伯明把它们一一挂在操作台上。有了它们,航天员将展开第二项舱外工作内容。
两人配合默契,一环扣着一环,第一项舱外工作顺利完成。

聂海胜进行机械臂操作
“天和”内,聂海胜“坐”在计算机旁,细心操作、准确指挥;机械臂缓缓移动,刘伯明“站”在脚限位器上,他继续移动,准备开展第二项工作。
汤洪波就没那么轻松了。11时左右,他跃身出舱,开始借助舱表扶手,用手“爬行”。每走一步,他都要把身上安全绳的另一端挂在扶手上,防止飘走。他速度很快,率先达到目的地——大、小柱段之间偏右的位置。
他们的第二项工作是将安装在此处的一个全景摄像机进行抬高。“通俗地讲就是给全景摄像机安装一个‘自拍杆’,使其在原来的位置上抬高一段,具备更佳的视场。”航天科技集团八院全景摄像机主任设计师徐起形象地描述。
汤洪波到达目的地后,徒手拔掉全景摄像机的电缆插头。很快,刘伯明也到了,在汤洪波的配合下,他拿出通用电动松不脱螺钉拆装工具,给全景摄像机装上把手、卸掉安装脚,小心翼翼把它取下来。据悉,研制人员为全景摄像机设计了一款舱外专用把手,既可在拆装全景摄像机时保护4个镜头,又可以方便航天员携带全景摄像机。
随后,刘伯明将一个圆柱形加长支架装在摄像机原来的位置,装摄像机、插电缆插头、拆把手。每一步操作,刘伯明都小心翼翼。这样的动作,他在水下预演了很多次,早已将要领熟记于心,但真在太空中操作,还是相当困难。
“安装好,辛苦啦,你们!”聂海胜说。随着全景摄像机开始工作,透过它的镜头可以看到,在白云的衬托下,蓝色的地球像海洋一样,非常漂亮。
太空环境异常复杂,科研人员把航天员生命安全放在首位,设计了多种安全保障措施,例如各类相机或摄像机实时监视等。尽管如此,逃生技能也是一堂必修课。为此,第三项舱外工作就是应急返回演练,主角是汤洪波。
在这项工作中,汤洪波要徒手爬到“天和”核心舱最远处。接到撤离指令后,他第一时间折回,以最快速度返回舱口,并直接进入节点舱。
“舱外活动非常考验航天员的臂力,人在失重环境下很难控制自己,轻轻移动就出去了,可要想停下来就得花很大力气。”汤溢说,这种应急返回场景,航天员在地面时就曾多次在水中演练,为的是必要时刻为自己赢得一线生机。“03感谢所有科技工作者,祝中国航天事业越来越好。”汤洪波快速爬到出舱口时,没有再等自己的队友,说完这句话就迅速进入节点舱。
刘伯明随着机械臂的移动,也很快来到舱口。他把工具一一取下来递给汤洪波,最后把操作台和脚限位器卸下来,并在汤洪波的配合下,完成舱外工具箱和脚限位器的安装。
“感谢所有参研参试的科研人员,感谢全国人民的大力支持,后续我们还会出舱,还会飞得更高,空间站还会越建越大。”刘伯明对着摄像机镜头挥手致意。
15时左右,刘伯明进入节点舱后,关舱门、复压、脱舱外航天服,打开节点舱前往大小柱段、神舟十二号飞船的3道舱门。
一系列收尾工作后,来自核心舱空调的风进来,神舟十二号飞船又能“呼吸”了。身处地面的神舟十二号飞船总体副主任设计师高旭终于松了一口气。“这几个小时,我们一直紧张地关注着神舟飞船内的温度变化,舱门关闭后,没有了核心舱带来的空调环境,飞船存在结冻风险,很可能损害科学载荷。”高旭说。
此次出舱活动中,核心舱机械臂首次托举航天员到指定位置圆满完成出舱操作,抬升天和核心舱舱外全景相机的位置,其大范围转移能力也得到了验证。
核心舱机械臂展开长度为10.2米,最多能承载25吨的重量,是空间站任务中的“大力士”。该机械臂由中国航天科技集团五院抓总研制,是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统,主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务。中国电科21所从2009年开始,为航天配套研制天和舱空间机械臂空间驱动组件、高精度位置传感器等机械臂核心部件及空间站任务其他相关配套电机。历时十余年,为机械臂成功配套了7个关节运动驱动组件及高精度位置传感器、3个末端执行器等关键设备。
核心舱机械臂是我国首个可长期在太空轨道运行的机械臂,其肩部设置了3个关节、肘部设置了1个关节、腕部设置了3个关节,一共7个关节,每个关节对应1个自由度,具有七自由度的活动能力。通过各个关节的旋转,能够实现前后左右任意角度与位置的抓取和操作,为航天员出舱顺利开展任务提供强有力的保证。
为扩大任务触及范围,该机械臂还具备“爬行”功能。其采用“肩3+肘1+腕3”的关节配置方案,肩部和腕部关节配置相同,意味着机械臂两端活动功能相同;肩部与腕部各装有一个末端执行器,可以对接舱体表面安装的目标适配器,机械臂通过末端执行器与目标适配器对接与分离,同时配合各关节的联合运动,从而实现在舱体上的爬行转移。
空间机械臂是我国航天事业发展的新领域之一,五院在抓总研制过程中,在关键技术、原材料选用、制造工艺、适应空间站环境的长寿命设计等方面均取得巨大突破和创新,机械臂全部核心部件实现国产化,形成多项国家空间机器人行业标准,使我国成为世界上第三个掌握大型空间机械臂核心技术并应用的国家。
作为航天员执行出舱任务的“机械伙伴”,由五院研制的舱外维修与辅助工具,可协助航天员有效克服航天服手套充压后操作不便、高难度单手操作、在轨防飘要求高等难题,具备辅助航天员在轨着航天服状态下开展舱外行走、位姿转换、设备更换、产品安全防护等多项功能,是执行舱外活动必不可少的工具。其包括用于舱外设备维修的舱外电动工具、舱外扳手、通用把手等。
舱外电动工具是此次维修任务用到的唯一机电类工具,它可以适应舱外复杂的真空和高低温环境,具有定力矩拧紧、拧松的工作模式,并且设置有休眠模式。
舱外通用把手可以安装到维修设备上,用于航天员在轨维修时进行待维修设备的转移及防漂,通过与设备端的通用把手底座配合,实现航天员单手完成对设备的快速锁定、解锁。
舱外辅助维修工具还包含便携式脚限位器、2种便携式安全带、舱外操作台及微型工作台等辅助工具。便携式脚限位器是此次维修任务中机构设计最为复杂的产品,共设计旋转、俯仰、滚转、偏航四个关节自由度,可协助航天员在舱外调整至执行任务的工作姿态;与之配合使用紧密的舱外操作台,可协助航天员进行维修任务时挂放设备和维修工具,解放航天员双手,实现设备或维修工具的临时存放。便携式安全带可协助航天员实现舱外作业位置设备及维修工具的防漂。与航天服直接相连的微型工作台,则像一根多功能腰带一样环绕在航天服腰部,将航天员出舱使用的舱外电动工具、舱外通用把手和舱外扳手随身携带,确保航天员随用随取。
航天员进行出舱活动时,与地面建立高速、及时的通信联系极为重要。出舱活动不仅是对航天员的全方位考验,也是对天和核心舱与地面测控站之间通信能力的一大考验。
五院研制的出舱通信子系统实现舱内外航天员之间、舱内外航天员与地面人员之间,以及舱外航天员之间的全双工语音通信,在航天员舱外活动范围内实现无线通信全覆盖。与上一代出舱通信系统相比,该产品具有通信距离更远、通信速率更高、工作寿命更长等特点,同时由于采用了功率控制、抗多径等措施,该产品具有更强的空间环境抗电磁干扰能力,并支持多名航天员同时出舱活动时的通话功能。
五院研制的出舱通信子系统实现舱内外航天员之间、舱内外航天员与地面人员之间,以及舱外航天员之间的全双工语音通信,在航天员舱外活动范围内实现无线通信全覆盖。
舱外图像传输子系统为舱外提供无线网络覆盖,通过出舱无线收发设备提供的“热点”进行图像传输,实现了航天员出舱活动进行实时显示,实时记录等功能,以及为太阳翼绕行测量试验提供数据传输功能。
同时,第三代中继终端产品通过与天链一号、天链二号中继卫星建立中继链路,实现中继通信,确保航天员与地面通信的实时畅通。这就好比在太空中搭建了地面与中继卫星、中继卫星与航天员之间的“天路”。
空间站中继终端与其他型号在设计上最大的区别在于,为了保证在轨使用的长寿命,需要具备在轨可维修性。空间站中继终端采用了集成化、模块化的设计思路,在保证传输信号质量的同时,方便航天员维修更换。
这次神舟十二号乘组在出舱时,使用的是我国自主研制的“飞天”舱外航天服,它究竟包含了哪些新的功能?能支持多久的出舱时间?航天员穿着它作业是否舒适?

中国航天员中心航天服工程室主任、航天员系统副总设计师张万欣说:“没有最好,只有更好。我们这套服装是二代的舱外航天服,然后它就是从功能上还是相当于一个微型的载人航天器。它最上面就是一个头盔,整个一个面窗,您看它实际上我们是四层的结构:两层是压力面窗,中间是充氮,然后它可以就是起到一个防结雾的作用,隔热和防结雾;另外最外层这是防护面窗,防护面窗怕他就是在作业过程中也难免有磕碰,可能会划伤,划伤之后就影响视野,所以就把这个防护面窗,这是在轨能更换;最外层这个滤光面窗,滤光面窗航天员根据就是阳照区和阴影区来放下和打开,就是阳照区相当于太阳镜,防止这个光线射入眼睛。”

航天员离开空间站进入太空,面临200多摄氏度的温差、空间辐射等一系列考验,而飞天舱外航天服有多层设计,实现了真空防护、高低温防护和辐射防护。
每个服装,就是它的每个关键功能都有一个就是冗余备份,所以一旦主份就是失效了,然后备份可以继续工作来保障航天员的安全,每套服装生产出来就是研制出来之后要做很多实验,凡是有可能穿这套服装的人都要来试穿。整个一个上肢,它也是根据人的关节来设置的,加转动的就用轴承,就可以动,然后臂轴承,还有一个就是腕轴承,一共有三个轴承。
新一代飞天舱外航天服无论是原材料、设计,还是确定实验方案、验证总结再改进,都是自主研发。相比于神舟七号翟志刚的出舱舱外服,它的安全可靠性更高,支持舱外活动的时间更久,使用寿命也更长,而最核心也是团队一直孜孜不倦追求突破的,就是如何让舱外航天服穿在身上更加舒适。

现在的服装自主工作时间可以长达八个小时。原来的服装就是一米六五到一米八的人来穿着,现在经过关节小型化的改进提升后,它可以满足一米六到一米八的人穿着使用,适体性越好,它的活动性能才能保障,就是人穿着它就工作起来更轻松。

此外,飞天舱外航天服可以调节适应每位航天员的体型。虽然重达130公斤,但穿脱起来极其方便快捷。 
张万欣说:“穿五分钟,脱五分钟,这个都是有计时的。一般情况下,受试人员包括航天员都用不了(五分钟),也就在三分钟左右。所有产品,就是所有那个就是金属产品,在经过拓扑设计,能把它镂空的都镂空了,因为它的功能决定了它就只能是这么重。所有其他的产品我们都是要求越轻越好,因为大家知道上行一克,那个产品的重量就等于一克黄金的价值,所以尽量把它做轻。”