步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。作为电力人对步进电机的也不能仅限于认识而已,应该深入了解它的结构、基本原理以及应用,接下来小七将从三个方面带大家全面认识步进电机。
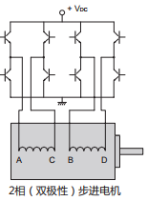
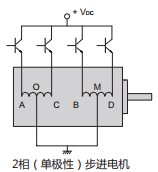
基本结构:

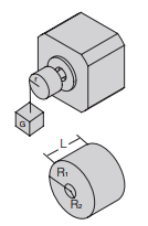
Tf = G * rTJ = J * dw/dtJ = M * (R12+R22) / 2 (Kg * cm)
n = q * Hz / (360 * D)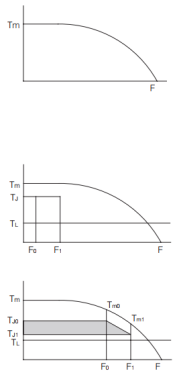
(1) 通常情况下 TJ = 70%Tm(2) tr = 1.8 * 10 -5 * J * q * (F1-F0)/(TJ -TL)(3) F (t) = (F1-F0) * t/tr + F0, 0<t<tr
TJ0 = 70%Tm0TJ1 = 70%Tm1TL = 60%Tm1
tr = F4 * In [(TJ 0-TL)/(TJ 1-TL)]F (t) = F2 * [1 – e^(-t/F4)] + F0, 0<t<trF2 = (TL-TJ 0) * (F1-F0)/TJ 1-TJ 0)F4 = 1.8 * 10-5 * J * q * F2/(TJ 0-TL)
B. 采用细分的驱动模式:使用微步驱动模式, 将原来的一步细分为多步运行, 提高电机的每步分辨率, 从而降低振动。这可以通过调整电机的相电流比来实现的。微步并不会增加步距角精确度, 却能使电机运行更加平稳, 噪音更小。一般电机在半步运行时, 力矩会比整步时小15%, 而采用正弦波电流控制时, 力矩将减小30%。
AM | 17 | HD | 0 | 0 | 01 | - | 01 |
1 | 2 | 3 | 4 | 5 | 6 | 7 |
1 | 产业机器专用系列 | |
2 | 机座号 | 电机外形尺寸 ( 机座尺寸为英制尺寸的 10 倍 )(6:14mm; 8:20 mm; 11:28mm; 14:35mm; 17:42mm; 23:56mm; 24:60mm;34:86mm; 42:110mm) |
3 | 步距角代号 | HY, HS, HD: 步距角 1.8° |
4 | 铁芯长度代号 | |
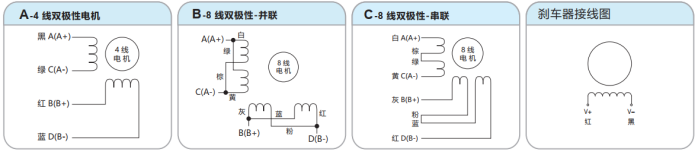
5 | 引线数量 | 0: 表示插座式电机4: 引出线 4 根8: 引出线 8 根 |
6 | 性能代号 | 表示电机的电流,力矩等性能参数 |
7 | 机械代号 | 表示电机的出轴、引线、螺钉、刹车器及编码器等机械参数-E1000D 编码器型、 -PGXX 减速机型、 -BR01 永磁式制动器型 |
规格 | 电机部分 | |
步距角精度 | ±5% ( 测试条件:恒流驱动器 /24V/ 两相通电 / 额定电流 / 整步速度:1rps) | |
绝缘等级 | B 级 (130°C) | |
使用环境(运行时) | 环境温度 | -20 ~ +50°C ( 无结冰 ) |
环境湿度 | 85% 以下 ( 无结露 ) | |
介质环境 | 无腐蚀性气体及尘埃。不直接接触水、 油等(标准型保护等级 IP65 规格:无腐蚀性气体。不直接接触油。) | |
温度上升 | 温升小于 80°C ( 温升是指在一定环境温度条件下, 线圈温度增加的最大值。绕组温度的测试采用电阻法。在恒压驱动模式下,驱动电压为额定电压, 两相通电, 转速为 0pps。在恒流驱动模式下, 驱动电流为额定电流, 两相通电, 转速为空载起动频率。散热板:铝板 160×160×t1.6(mm)) | |
径向跳动 | 0.050T.I.R.(mm) | |
径向窜动 | 0.02mm Max.(500gf) | |
轴向窜动 | 0.08mm Max.(500gf) | |
安装法兰相对于转轴的同轴度 | 0.075T.I.R.(mm) | |
安装面相对于转轴的垂直度 | 0.100T.I.R.(mm) | |
机座型号 | 允许径向负载(距轴端的距离 L) | 允许轴向负载 | ||||
0mm | 5mm | 10mm | 15mm | 20mm | ||
6HY | 12 | 15 | 20 | --- | --- | 电机本身重量以下 |
8HY | 12 | 15 | 20 | --- | --- | |
11HS | 20 | 25 | 34 | 52 | --- | |
14HS | 20 | 25 | 34 | 52 | --- | |
17HD | 20 | 25 | 34 | 52 | --- | |
23HS | 50 | 60 | 75 | 100 | 150 | |
24HS | 61 | 73 | 90 | 110 | 160 | |
34HD | 260 | 290 | 340 | 390 | 480 | |
42HS | 390 | 435 | 510 | 585 | 720 | |

